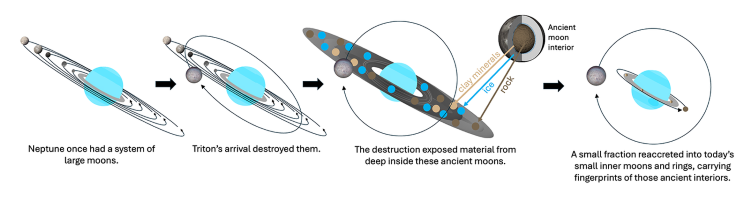
The planet Neptune has 16 known moons, with its largest Moon, Triton, comprising more than 99.5 percent of the mass of all of them. Triton’s incredible size has led scientists to hypothesize it was a captured object originating from the Kuiper Belt, which wreaked havoc on Neptune’s original moon system upon its capture and subsequential elliptical orbit. Today, some remnants of these original moons are part of the dusty rings that orbit Neptune. But what did that original moon system consist of? Were they the same small worlds observed today or are they pieces of what was once much larger worlds?